La serie TIN de máquinas especializadas se utiliza en líneas de transporte de rodillos para logística
Solución del 5 de noviembre de 2025
JD.com y Taobao están forjando gradualmente una relación competitiva pero cooperativa, derribando barreras. Ambas compañías han logrado la interconexión e interoperabilidad en el proceso de pago (Taobao integra WeChat Pay, JD.com integra Alipay) y en el proceso logístico (JD Logistics integra Taobao/Tmall, Cainiao integra las plataformas no operadas por JD.com), abandonando el modelo competitivo anterior de "invadir territorio y levantar muros"
Al mismo tiempo, el sector logístico nacional también está experimentando una profunda integración y transformación. Para impulsar un desarrollo de alta calidad en el sector, la tecnología logística inteligente está potenciando y optimizando integralmente los eslabones clave de la cadena logística, como el transporte, la clasificación, el pesaje y la separación
El proceso de transporte logístico utiliza uno de tres métodos: transportador de rodillos, transportador de cinta o transportador de cadena. Los métodos de transporte altamente automatizados pueden reducir la manipulación manual y mejorar la eficiencia
Proceso de funcionamiento de la línea transportadora de rodillos
① El brazo robótico del proceso anterior coloca la pieza de trabajo en el área de descarga;
② La pieza se desplaza hacia la derecha a lo largo del transportador de rodillos y llega al mecanismo de alimentación secuencial. Este mecanismo coloca entonces una pieza a la vez en la posición de recogida
③ El mecanismo de elevación levanta la pieza de trabajo, que luego es retirada por el brazo del robot en el siguiente proceso
Solución
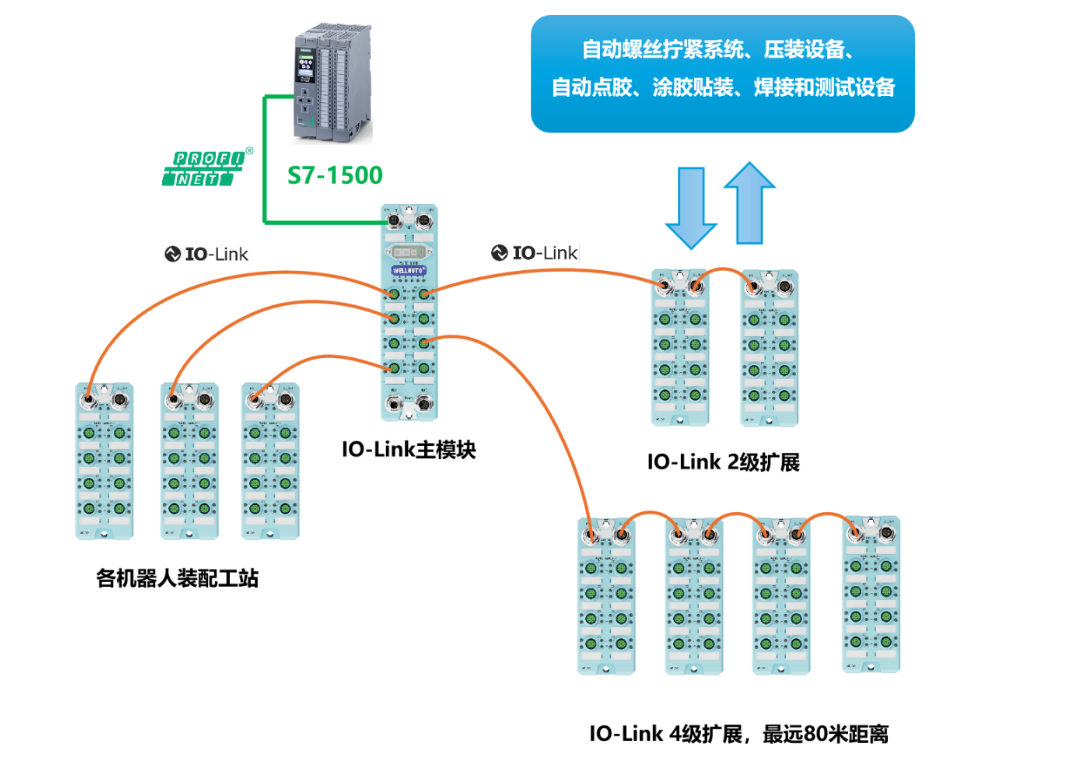
En este caso, se utiliza una unidad principal Siemens y un módulo de máquina TIN específico para la industria, que se comunican mediante el protocolo de bus Profinet. El módulo recibe señales de interruptores de detección de posición, como la posición de alimentación, la parada secuencial, la posición de parada final y la posición de la pieza de trabajo después de la elevación, controlando así la rotación hacia adelante y hacia atrás del motor y la velocidad del tambor
Artículos relacionados

![[Caso de aplicación] Expansión de cuatro niveles IO-LINK aplicada a líneas de módulos de baterías de litio](https://www.wellauto.net/wp-content/uploads/2026/01/2026010609063157.png)